T'agrada el Control i la robòtica, vols descobrir-la? Ací en tens per a començar.
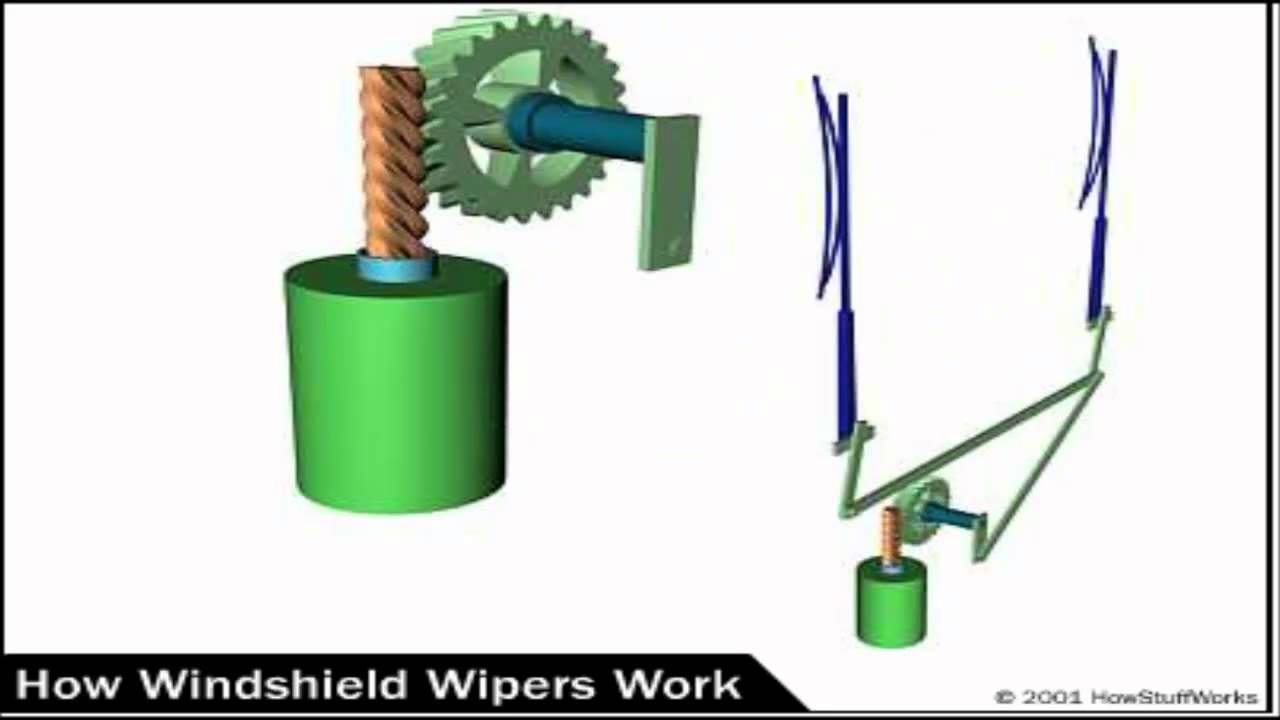
Abans de res haurem de definir, que és un mecanisme? bé en poques paraules, un mecanisme, és un aparell que realitza una operació sempre igual. Pot ser, que l’operació es puga fer manualment, i també aplicant-li una font de energia, per a fer el moviment automàticament.
També podem parlar-ne d’un l'automatisme com un dispositiu que aprofita les forces,canviant-ne el sentit o la direcció d’un moviment.
Com hem vist abans ens apareix altre concepte, aquest és, l’Automatisme: són mecanismes, que repeteixen constantment una acció per a la qual estan dissenyats, però que la seva tasca no es pot modificar en cap moment. Podiem dir que fan una tasca repetitiva.
El pas següent a l’automatisme prou més complex que aquest, están els robots. Com podiem definir un robot en poques paraules: és una màquina automàtica reprogramable- les seues tasques es podem modificar canviant el programa- capaç de detectar informació de l’entorn i de reaccionar davant aquesta nova informació.

Posem una porta que s’obri en detectar-nos, per què fa aquesta acció? Per tal de fer-ho es requereix una serie d’elements determinants:
Sensors ( hi han de moltes maneres i per fer tasques diferents , llum, moviments, humitat, etc). Un sensor detecta una informació en forma de magnituds físiques. Què desprès passa tota aquesta informació a altra part del procés, als controladors.(posar fotos de sensors).
Altre element és un circuit elèctric, què fa de controlador de les dades que li han passat els sensors.
I un mecanisme que transforma el moviment rotatori del motor en un moviment lineal -en el cas de la porta-, o d’altre tipus de moviment.
Tot tres components interconnectats entre si, permeten automatitzar una màquina o un procés reben el nom de sistema de control.
Els components d’un sistema de control poden ser molt diversos, des de molt elementals fins a molt complicats, alguns exemples poden ser de molts tipus: electrónics, pneumàtic, hidràulics, eléctrics etc, cada un de ells per a diferents tasques.
Un sistema de control en general el poguem representar de la següent manera:

Entrada: (En) és la informació que rep el sistema, per després controlar i respondre en una acció.
Eixida: (E) és la resposta que dóna el sistema a la informació rebuda.
Podem trobar sistemes de control en automatismes molt simples com ara un depósit d’un inodor, una torradora de pa. I tant complexos com ara el pilot automàtic d’un avió, o el tauler de control d’una central nuclear.


Tipus de sistemes de control: De llaç obert, i de llaç tancat.
De LLAÇ OBERT: en poques paraules es en l’entrada (en), s’activa l ’acció al controlador, aquest passa la informació a l’actuador, aquest al processador, i aquest respon en l’acció pertinent. Entre el primer pas i l’últim no hi ha cap interrupció, ni cap variable a tenir en compte.
Un exemple seria un ventilador per l’habitació de la nostra casa. Representat seria:
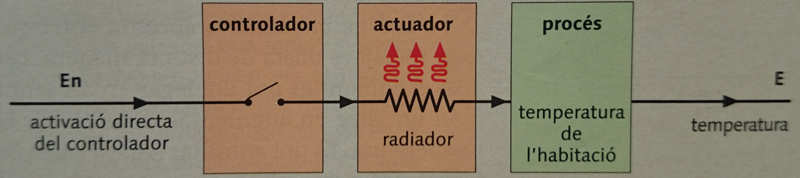
com es pot comprovar en tot el procés no es té en compte la temperatura inicial, ni la temperatura a la que volem tenir l’habitació, per tant el ventilador està en marxa per l’acció del controlador, i la temperatura final no està controlada en cap moment.

De LLAÇ TANCAT: En aquest tipus de controlador hi ha una realimentació- procés que consisteix en enviar informació sobre l’estat d’eixida al d’entrada- de l’exida a l’entrada. L’exida es comparada amb l’entrada a fi de correguir possibles errors, a causa de pertorbacions, que afecten el sistema.
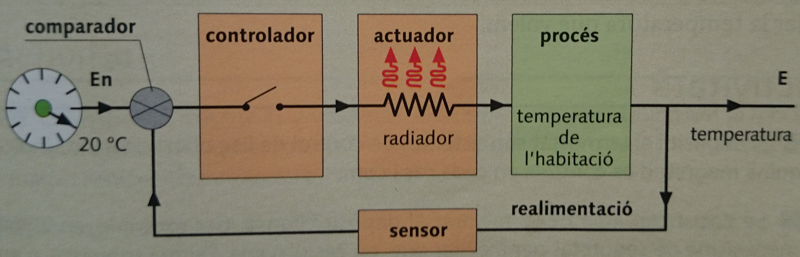
Un exemple de llaç tancat seria, tenir una habitació o una casa, a una certa temperatura.(calefacció central d’una casa). Explicant el procés seria: tenim un sensor de temperatura (termoestato), seria el comparador de temperatura, entre el desitgant per nosaltres per a la casa i la temperatura ambient, a partir de aquesta acció començaria tot el procés.

Parlem del Robot.
Un pas més endavant en aquest petit estudi ens trobem en el robots. Els robots són sistemes automàtics que es poden emprar per a fer diverses tasques, (pintar cotxes, fins i tot a treballs dins de linees de producció complexes, tant de automovils com de begudes, que totes les dies utilitzem d’una o altra manera.
L’estructura més simple d’un robot, seria molt semblant a la dels sistemes automàtics que hem vist linees més amunt. Anem a comprovar-ho tenint en compte les parts fonamentals que’l formen. Aquestes essencialment son quatre : controlador, actuador i transmissió, sensor i alimentació.
Anem a veure què fa cadascun d’ells, i com entren a formar part del procés total o de resultat del robot.
El robot necessita saber tot el què l’envolta per tenir una idea d’on es troba per això utilitza els sensors. elements que mesuren les magnituds físiques, com ara la humitat ambiental, la temperatura, llum etc., per passar-li-les després a la unitat de control i puga entendre’ls. i reaccionar el robot en consecuencia. (segons tinga programat el dit robot).
Els sensors els podem classificar de dues formes, un els sensors interns, que tenen els robots (velocitat, força, temps..). Altres sensors, els que ens donen informació de l’entorn exterior, en que actua el robot (llum, obstacles so,sonars, i fins i tot càmeres de video).
Els actuadors reben com a entrada (En) les ordres des del controlador, i com a eixida (E) ofereixen moviment -reacció a les ordres- . La transmissió modifica mecànicament el moviment a una forma convenient. (exemple seguir per una linea, a les ordres d’un sensor de llum).
Altra part fonamental és l’alimentació,tant del controlador com dels motors del robot. (aquesta alimentació pot ser de bateries o de plaques solars segons el disseny del robot i on vaja a actuar). La capacitat es mesura en amperes per hora, que indica el corrent que són capaços de proporcionar durant un temps determinat.
En quant a la funció del controlador és diriguir el trebal dels actuadors del robot. L’entrada (En) és la informació rebuda dels sensor (segons el tipus de sensors). L’eixida (E) consta d’ordres elèctriques que s’envien als actuadors.
Avui en dia els robots estan controlats mitjançant la programació per ordinadors.
Un esquema senzill de tot els que hem estat veien podria ser el següent:

SOJOURNER, robot utilitzat per explorar la superficie de Mart en 1997. Aquest robot utilitzava alimentació fotovoltàica.
.
Esquema del funcionament d’una embotelladora, mitjançant robótica.

Més endavant parlarem dels tipus de llenguatges per a programar distints tipus de robots.
Autors: Toni Fayos i Guillermo Garcia
Fons:
https://es.wikipedia.org
UPC Universitat Politécnica de Catalunya
http://www.edubrick.cl/2009/
http://www.ro-botica.com
Oxford Educació
No hay comentarios:
Publicar un comentario